- Схема пуска двигателя постоянного тока независимого возбуждения в функции ЭДС
- Принцип работы схемы
- Способы запуска электродвигателя постоянного тока
- Прямой пуск
- Пуск с помощью пускового реостата
- Запуск ДПТ с параллельным возбуждением
- Запуск ДПТ с последовательным возбуждением
- Пуск ДПТ с независимым возбуждением
- Пуск путем изменения питающего напряжения
- Схема пуска двигателя постоянного тока независимого возбуждения в функции тока
- Принцип работы схемы
- Схемы электродвигателей постоянного тока и их характеристики
Схема пуска двигателя постоянного тока независимого возбуждения в функции ЭДС

Рассмотрим схему пуска двигателя постоянного тока независимого возбуждения в функции ЭДС (скорости)
При данной схеме скорость вращения двигателя определяется косвенным путём, т.е. изменением ЭДС в цепи якоря, значение которой увеличивается с ростом угловой скорости двигателя. 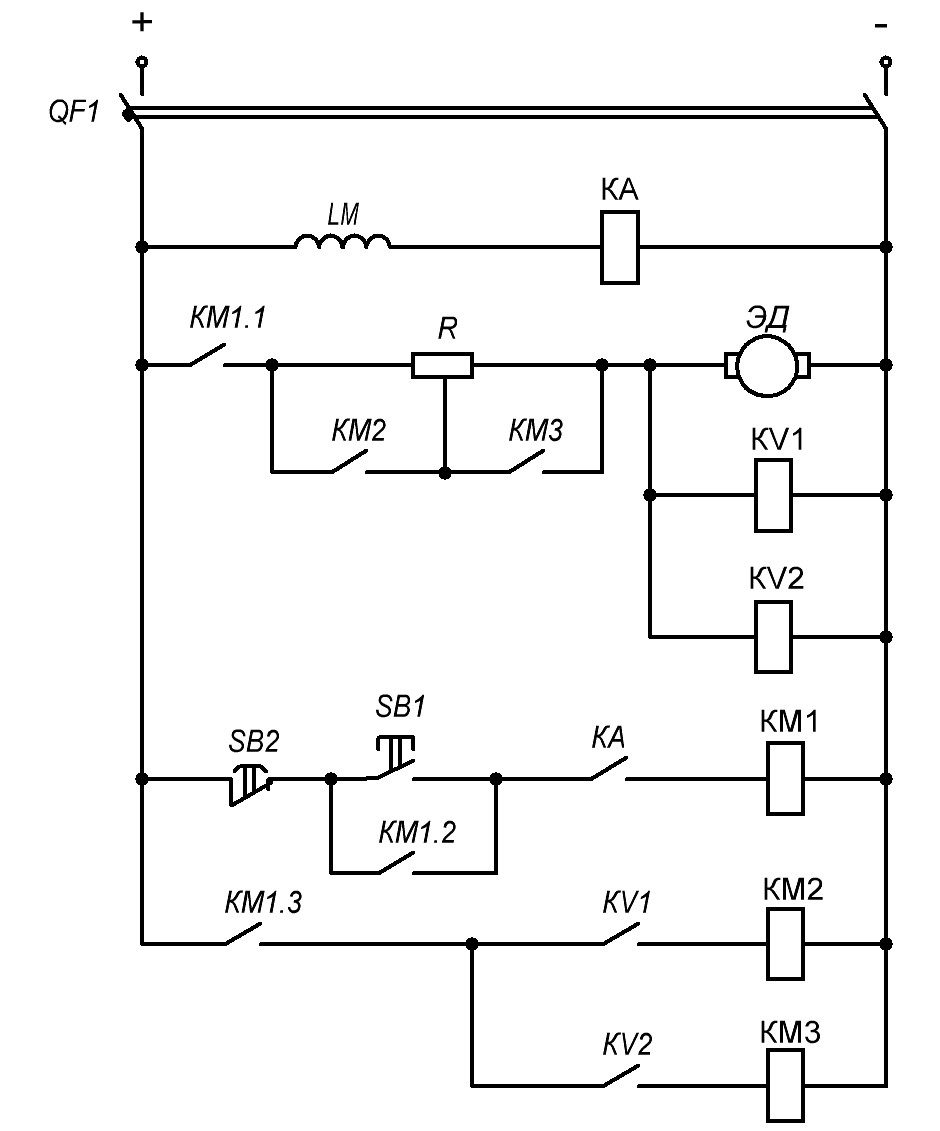
Управление в функции ЭДС (или скорости) реализовано при помощи реле напряжения KV, которые настроены на срабатывания при различных значениях ЭДС в цепи якоря.
Перед изучением принципа работы схемы — рекомендуется ознакомиться с данным материалом.
Принцип работы схемы
Включением автоматического выключателя QF1, напряжение поступает на обмотку возбуждения LM двигателя и катушку КА, которое замыкает свой контакт КА. Реле минимального тока КА служит для защиты двигателя от обрыва в цепи возбуждения.
 После нажатия кнопки “Пуск” SB1, запитывается магнитный пускатель КМ1, который замыкает контакты:
После нажатия кнопки “Пуск” SB1, запитывается магнитный пускатель КМ1, который замыкает контакты:
- КМ1.2 — шунтирует кнопку “Пуск” (позволяет не удерживать кнопку SB1 в нажатом положении)
- КМ1.1 в цепи якоря — двигатель запускается с включенными в цепь якоря двумя ступенями реостата, так как контакторы КМ2 и КМ3 питания не получают.
- КМ1.3 в цепи питания катушки магнитных пускателей КМ2 и КМ3, контакты которых остаются в исходном положении до срабатывания реле KV1 и KV2.
Двигатель разгоняется по искусственной характеристике 1.

С ростом скорости растет и ЭДС в цепи якоря, и напряжение на катушках реле KV1, KV2. При скорости ω1 (равной n1) срабатывает реле KV1 которое замыкает контакт KV1 после чего на катушку КМ2 подаётся напряжение. КМ2 в свою очередь шунтирует своим контактом KM2 первую ступень реостата.
Дальнейший разгон двигателя происходит по искусственной характеристике 2. При достижении скорости ω2 (равной n2) ЭДС в цепи якоря достигает значения достаточного для срабатывания реле KV2.
Реле напряжения KV2 замыкает контакт KV2, что приводит к срабатыванию КM3 и шунтированию второй ступени реостата контактом КM3.
Двигатель выходит на естественную механическую характеристику 3 по которой достигает своей номинальной скорости вращения. Пуск двигателя постоянного тока независимого возбуждения (ДПТ НВ) в функции ЭДС окончен.
Способы запуска электродвигателя постоянного тока
Хорошие тяговые характеристики электрических машин постоянного тока сделали их неотъемлемым элементом большинства устройств промышленной и бытовой механизации. Но вместе с тем возникает и существенная проблема значительных пусковых токов, в сравнении с асинхронными электродвигателями, работающих на переменном напряжении. Именно поэтому многие специалисты детально изучают способы запуска электродвигателя постоянного тока, прежде чем включить агрегат.
Прямой пуск
Из всех электродвигателей постоянного тока основная градация при выборе способа их запуска должна учитывать мощность устройства.
В целом выделяют три вида пуска:
- малой мощности;
- средней;
- большой мощности.
Для прямого запуска подойдут только маломощные электродвигатели, которые потребляют до 1кВт электроэнергии в сети. При прямых запусках электродвигателя все напряжение сразу подается на рабочую обмотку. Это обуславливает возникновение максимального пускового тока из-за отсутствия естественной компенсации за счет ЭДС противодействия.
С физической точки зрения ситуация в обмотках ротора будет выглядеть следующим образом: в момент подачи напряжения сила тока в обмотках равна нулю, поэтому его значение будет определяться по формуле:
U – приложенная к выводам номинальное напряжение, Rобм – сопротивление катушки.
В этот момент величина токовой нагрузки электродвигателя постоянного тока является максимальной, он может отличаться от номинального значения в 1,5 – 2,5 раза. После этого протекание тока обуславливает генерацию ЭДС противодействия, которая компенсирует пусковую нагрузку до установки номинальной мощности, тогда ток станет:
В мощных устройствах сопротивление обмоток якоря может равняться 1 или 0,5 Ом, из-за чего ток при запуске электродвигателя может достигнуть 200 – 500 А, что в 10 – 50 раз будет превышать допустимые величины. Это, в свою очередь, может привести к термическому отпуску металла, деформации проводников, разрушению колец или щеток скользящего контакта. Поэтому двигатели постоянного тока средней и большой мощности должны вводиться в работу реостатным запуском или путем подачи заведомо пониженного напряжения, прямой пуск для них крайне опасен.
Пуск с помощью пускового реостата
В этом случае в цепь вводится переменное сопротивление, которое на начальном этапе обеспечивает снижение токовой нагрузки, пока вращение ротора не достигнет установленных оборотов. По мере стабилизации ампеража до стандартной величины в реостате уменьшается сопротивление от максимального значения до минимального.
Расчет электрической величины в этом случае будет производиться по формуле:
В лабораторных условиях уменьшение нагрузки может производиться вручную – посредством перемещения ползунка реостата. Однако в промышленности такой метод не получил широкого распространения, так как процесс не согласовывается с токовыми величинами. Поэтому применяется регулировка по току, по ЭДС или по времени, в первом случае задействуется измерение величины в обмотках возбуждения, во втором, на каждую ступень применяется выдержка времени.
Оба метода используются для запуска электродвигателей:
- с последовательным;
- с параллельным возбуждением;
- с независимым возбуждением.
Запуск ДПТ с параллельным возбуждением
Такой запуск электродвигателя осуществляется посредством включения и обмотки возбуждения, и якорной к напряжению питания электросети, друг относительно друга они располагаются параллельно. То есть каждая из обмоток электродвигателя постоянного тока находятся под одинаковой разностью потенциалов. Этот метод запуска обеспечивает жесткий режим работы, используемый в станочном оборудовании. Токовая нагрузка во вспомогательной обмотке при запуске имеет сравнительно меньший ток, чем обмотки статора или ротора.
Для контроля пусковых характеристик сопротивления вводятся в обе цепи:
 Рис 1. Запуск ДПТ с параллельным возбуждением
Рис 1. Запуск ДПТ с параллельным возбуждением
На начальном этапе вращения вала позиции реостата обеспечивают снижение нагрузки на электродвигатель, а затем их обратно выводят в положение нулевого сопротивления. При затяжных запусках выполняется автоматизация и комбинация нескольких ступеней пусковых реостатов или отдельных резисторов, пример такой схемы включения приведен на рисунке ниже:
 Рис. 2. Ступенчатый пуск двигателя параллельного возбуждения
Рис. 2. Ступенчатый пуск двигателя параллельного возбуждения
- При подаче напряжения питания на электродвигатель ток, протекающий через рабочие обмотки и обмотку возбуждения, за счет магазина сопротивлений Rпуск1, Rпуск2, Rпуск3 нагрузка ограничивается до минимальной величины.
- После достижения порогового значения минимума токовой величины происходит последовательное срабатывание реле K1, K2, K3.
- В результате замыкания контактов реле K1.1 шунтируется первый резистор, рабочая характеристика в цепи питания электродвигателя скачкообразно повышается.
- Но после снижения ниже установленного предела замыкаются контакты K2.2 и процесс повторяется снова, пока электрическая машина не достигнет номинальной частоты вращения.
Торможение электродвигателя постоянного тока может производиться в обратной последовательности за счет тех же резисторов.
Запуск ДПТ с последовательным возбуждением
На рисунке выше приведена принципиальная схема подключения электродвигателя с последовательным возбуждением. Ее отличительная особенность заключается в последовательном соединении катушки возбуждения Lвозбуждения и непосредственно мотора, переменное сопротивление Rякоря также вводится последовательно.
По цепи обеих катушек протекает одинаковая токовая величина, эта схема обладает хорошими параметрами запуска, поэтому ее часто используют в электрическом транспорте. Такой электродвигатель запрещено включать без усилия на валу, а регулирование частоты осуществляется в соответствии с нагрузкой.
Пуск ДПТ с независимым возбуждением
Подключение электродвигателя в цепь с независимым возбуждением производится путем ее запитки от отдельного источника.
 Рис. 4. Запуск ДПТ с независимым возбуждением
Рис. 4. Запуск ДПТ с независимым возбуждением
На схеме приведен пример независимого подключения, здесь катушка Lвозбуждения и сопротивление в ее цепи Rвозбуждения получают питание отдельно от обмоток двигателя током независимого устройства. Для обмоток двигателя также включается регулировочный реостат Rякоря. При этом способе запуска машина постоянного тока не должна включаться без нагрузки или с минимальным усилием на валу, так как это приведет к нарастанию оборотов и последующей поломке.
Пуск путем изменения питающего напряжения
Одним из вариантов снижения токовой нагрузки при запуске электродвигателя является уменьшение питающего номинала посредством генератора постоянного напряжения или управляемого выпрямителя.
С физической точки зрения установка реостата обеспечивает тот же эффект, но с увеличением мощности электродвигателя возрастает и постоянная токовая нагрузка, существенно повышаются потери на реостатах. Поэтому снижение постоянного напряжения выполняет отдельное устройство на базе микросхемы, пример которого приведен на рисунке ниже:
 Рис. 5. Схема пуска с изменением питающего напряжения
Рис. 5. Схема пуска с изменением питающего напряжения
Схема пуска двигателя постоянного тока независимого возбуждения в функции тока
Данная схема реализована при помощи реле максимального тока KА1, КА2 которые срабатывают при пусковом токе I1 и отпадают при минимальном токе I2.
Перед изучением принципа работы схемы — рекомендуется ознакомиться с данным материалом.
Пуск двигателя постоянного тока независимого возбуждения (ДПТ НВ) осуществляется с полностью ведённым резистором в цепи якоря. По мере разгона двигателя — пусковой ток уменьшается до значения I2, при котором токовое реле KA1 отпускает свои контакты, тем самым запитывая контактор КМ2. КМ2 в свою очередь шунтирует первую ступень реостата. Аналогично выводится вторая ступень резистора (КА2 — КМ3).
Для правильной работы схемы необходимо: что бы собственное время срабатывания токовых реле было меньше собственного времени срабатывания контактора!
Сопротивления ступеней резистора выбираются таким образом, чтобы в момент включения двигателя и шунтирования ступеней, ток I1 и момент М1 не превышали допустимых значений.
Принцип работы схемы
Включением автоматического выключателя QF1 напряжение поступает на обмотку возбуждения LM двигателя и катушку реле КА, которое замыкает свой контакт КА. Реле минимального тока КА служит для защиты двигателя от обрыва в цепи возбуждения.

Нажатием кнопки SB1 производится пуск двигателя. Магнитный пускатель КМ1 срабатывает и замыкает контакты — в цепи якоря начинает протекать пусковой ток I1. Под действием тока I1 срабатывает реле максимального тока КА1. Его нормально замкнутый контакт КА1 размыкается, препятствуя срабатыванию КМ2. Двигатель разгоняется по искусственной характеристике 1.

С ростом скорости двигателя пусковой ток уменьшается. При достижении значения I2 — токовое реле КА1 замыкает контакт КА1 в цепи катушки контактора КМ2. КМ2 срабатывает и шунтирует контактом КМ2.1 первую ступень резистора и реле КА1.

Пусковой ток после переключения протекает через КА2 и возрастает до значения I1. Под действием тока I1 токовое реле КА2 срабатывает и размыкает свои контакты в цепи катушки контактора КМ3. Двигатель разгоняется по искусственной характеристике 2.
При достижении частоты вращения n2, пусковой ток уменьшается до значения I2. Реле КА2 отпускает свои контакты и запитывает контактор КМ3. КМ3 срабатывает и полностью шунтирует пусковой резистор. Двигатель выходит на естественную характеристику 3, по которой разгоняется до номинальной частоты. Пуск окончен.
Для работы схемы необходимо, что бы время срабатывания КА1 и КА2 было меньше времени срабатывания контакторов.
Останов двигателя осуществляется нажатием кнопки «Стоп» SB2.
Схемы электродвигателей постоянного тока и их характеристики
 Свойства электродвигателей постоянного тока определяются в основном способом включения обмотки возбуждения. В зависимости от этого различают электродвигатели:
Свойства электродвигателей постоянного тока определяются в основном способом включения обмотки возбуждения. В зависимости от этого различают электродвигатели:
1. с независимым возбуждением : обмотка возбуждения питается от постороннего источника постоянного тока (возбудителя или выпрямителя) ,
2. с параллельным возбуждением : обмотка возбуждения подключена параллельно обмотке якоря,
3. с последовательным возбуждением : обмотка возбуждения включена последовательно с обмоткой якоря,
4. со смешанным возбуждением : он имеет две обмотки возбуждения, одна подключена параллельно обмотке якоря, а другая — последовательно с ней.
Все эти электродвигатели имеют одинаковое устройство и отличаются лишь выполнением обмотки возбуждения. Обмотки возбуждения указанных электродвигателей выполняют так же, как у соответствующих генераторов .
Электродвигатель постоянного тока с независимым возбуждением
В этом электродвигателе (рис. 1, а) обмотка якоря подключена к основному источнику постоянного тока (сети постоянного тока, генератору или выпрямителю) с напряжением U, а обмотка возбуждения — к вспомогательному источнику в напряжением UB. В цепь обмотки возбуждения включен регулировочный реостат Rрв, а в цепь обмотки якоря — пусковой реостат Rn.
Регулировочный реостат служит для регулирования частоты вращения якоря двигателя, а пусковой — для ограничения тока в обмотке якоря при пуске. Характерной особенностью электродвигателя является то, что его ток возбуждения Iв не зависит от тока Iя в обмотке якоря (тока нагрузки). Поэтому, пренебрегая размагничивающим действием реакции якоря, можно приближенно считать, что и поток двигателя Ф не зависит от нагрузки. Зависимости электромагнитного момента М и частоты вращения n от тока Iя будут линейными (рис. 2, а). Следовательно, линейной будет и механическая характеристика двигателя — зависимость п (М) (рис. 2, б).
При отсутствии в цепи якоря реостата с сопротивлением Rn скоростная и механическая характеристики будут жесткими, т. е. с малым углом наклона к горизонтальной оси, так как падение напряжения IяΣRя в обмотках машины, включенных в цепь якоря, при номинальной нагрузке составляет лишь 3—5 % от Uном. Эти характеристики (прямые 1 на рис. 2, а и б) называются естественными. При включении в цепь якоря реостата с сопротивлением Rn угол наклона этих характеристик возрастает, вследствие чего можно получить семейство реостатных характеристик 2, 3 и 4, соответствующих различным значениям Rn1, Rn2 и Rn3.
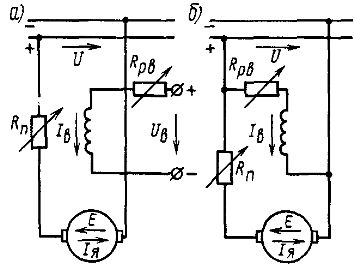
Рис. 1. Принципиальные схемы электродвигателей постоянного тока с независимым (а) и параллельным (б) возбуждением
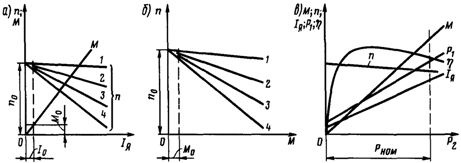
Рис. 2. Характеристики электродвигателей постоянного тока с независимым и параллельным возбуждением : а — скоростные и моментная, б — механические, в — рабочие Чем больше сопротивление Rn, тем больший угол наклона имеет реостатная характеристика, т. е. тем она мягче.
Регулировочный реостат Rpв позволяет изменять ток возбуждения двигателя Iв и его магнитный поток Ф. При этом будет изменяться и частота вращения n.
В цепь обмотки возбуждения никаких выключателей и предохранителей не устанавливают, так как при разрыве этой цепи резко уменьшается магнитный поток электродвигателя (в нем остается лишь поток от остаточного магнетизма) и возникает аварийный режим. Если электродвигатель работает при холостом ходе или небольшой нагрузке на валу, то частота вращения резко возрастает (двигатель идет вразнос). При этом сильно увеличивается ток в обмотке якоря Iя и может возникнуть круговой огонь. Во избежание этого защита должна отключить электродвигатель от источника питания.
Резкое увеличение частоты вращения при обрыве цепи обмотки возбуждения объясняется тем, что в этом случае резко уменьшаются магнитный поток Ф (до значения потока Фост от остаточного магнетизма) и э. д. с. Е и возрастает ток Iя. А так как приложенное напряжение U остается неизменным, то частота вращения n будет увеличиваться до тех пор, пока э. д. с. Е не достигнет значения, приблизительно равного U (что необходимо для равновесного состояния электрической цепи якоря, при котором E= U — IяΣRя.
При нагрузке на валу, близкой к номинальной, электродвигатель в случае разрыва цепи возбуждения остановится, так как электромагнитный момент, который может развить двигатель при значительном уменьшении магнитного потока, уменьшается и станет меньше нагрузочного момента на валу. В этом случае так же резко увеличивается ток Iя, и машина должна быть отключена от источника питания.
Следует отметить, что частота вращения n0 соответствует идеальному холостому ходу, когда двигатель не потребляет из сети электрической энергии и его электромагнитный момент равен нулю. В реальных условиях в режиме холостого хода двигатель потребляет из сети ток холостого хода I0, необходимый для компенсации внутренних потерь мощности, и развивает некоторый момент M0, требуемый для преодоления сил трения в машине. Поэтому в действительности частота вращения при холостом ходе меньше n0.
Зависимость частоты вращения n и электромагнитного момента М от мощности Р2 (рис. 2, в) на валу двигателя, как следует из рассмотренных соотношений, является линейной. Зависимости тока обмотки якоря Iя и мощности Р1 от Р2 также практически линейны. Ток Iя и мощность Р1 при Р2 = 0 представляют собой ток холостого хода I0 и мощность Р0, потребляемую при холостом ходе. Кривая к. п. д. имеет характер, общий для всех электрических машин.
Электродвигатель постоянного тока с параллельным возбуждением
В этом электродвигателе (см. рис. 1, б) обмотки возбуждения и якоря питаются от одного и того же источника электрической энергии с напряжением U. В цепь обмотки возбуждения включен регулировочный реостат Rpв, а в цепь обмотки якоря — пусковой реостат Rп.
В рассматриваемом электродвигателе имеет место, по существу, раздельное питание цепей обмоток якоря и возбуждения, вследствие чего ток возбуждения Iв не зависит от тока обмотки якоря Iв. Поэтому электродвигатель с параллельным возбуждением будет иметь такие же характеристики, как и двигатель с независимым возбуждением. Однако двигатель с параллельным возбуждением работает нормально только при питании от источника постоянного тока с неизменным напряжением.
При питании электродвигателя от источника с изменяющимся напряжением (генератор или управляемый выпрямитель) уменьшение питающего напряжения U вызывает соответствующее уменьшение тока возбуждения Iв и магнитного потока Ф, что приводит к увеличению тока обмотки якоря Iя. Это ограничивает возможность регулирования частоты вращения якоря путем изменения питающего напряжения U. Поэтому электродвигатели, предназначенные для питания от генератора или управляемого выпрямителя, должны иметь независимое возбуждение.
Электродвигатель постоянного тока с последовательным возбуждением
Для ограничения тока при пуске в цепь обмотки якоря включен пусковой реостат Rп (рис. 3, а), а для регулирования частоты вращения параллельно обмотке возбуждения может быть включен регулировочный реостат Rрв.
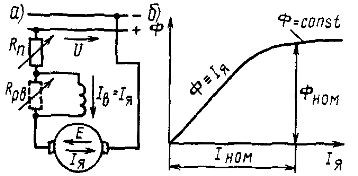
Рис. 3. Принципиальная схема электродвигателя постоянного тока с последовательным возбуждением (а) и зависимость его магнитного потока Ф от тока Iя в обмотке якоря (б)
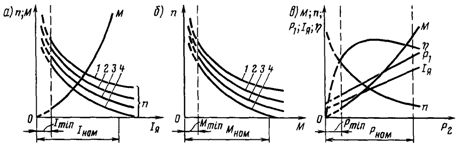
Рис. 4. Характеристики электродвигателя постоянного тока с последовательным возбуждением: а — скоростные и моментная, б — механические, в — рабочие.
Характерной особенностью этого электродвигателя является то, что его ток возбуждения Iв равен или пропорционален (при включении реостата Rpв) току обмотки якоря Iя, поэтому магнитный поток Ф зависит от нагрузки двигателя (рис. 3, б).
При токе обмотки якоря Iя, меньшем (0,8—0,9) номинального тока Iном магнитная система машины не насыщена и можно считать, что магнитный поток Ф изменяется прямо пропорционально току Iя. Поэтому скоростная характеристика электродвигателя будет мягкая — с увеличением тока Iя частота вращения n будет резко уменьшаться (рис. 4, а). Уменьшение частоты вращения n, происходит из-за увеличения падения напряжения IяΣRя. во внутреннем сопротивлении Rя. цепи обмотки якоря, а также из-за увеличения магнитного потока Ф.
Электромагнитный момент М при увеличении тока Iя будет резко возрастать, так как в этом случае увеличивается и магнитный поток Ф, т. е. момент М будет пропорционален току Iя. Поэтому при токе Iя, меньшем (0,8 Н- 0,9) Iном, скоростная характеристика имеет форму гиперболы, а моментная — параболы.
При токах Iя > Iном зависимости М и п от Iя линейны, так как в этом режиме магнитная цепь будет насыщена и магнитный поток Ф при изменении тока Iя меняться не будет.
Механическая характеристика, т. е. зависимость n от М (рис. 4, б), может быть построена на основании зависимостей n и М от Iя. Кроме естественной характеристики 1, можно путем включения в цепь обмотки якоря реостата с сопротивлением Rп получить семейство реостатных характеристик 2, 3 и 4. Эти характеристики соответствуют различным значениям Rn1, Rn2 и Rn3, при этом чем больше Rn, тем ниже располагается характеристика.
Механическая характеристика рассматриваемого двигателя мягкая и имеет гиперболический характер. При малых нагрузках магнитный поток Ф сильно уменьшается, частота вращения n резко возрастает и может превысить максимально допустимое значение (двигатель идет вразнос). Поэтому такие двигатели нельзя применять для привода механизмов, работающих в режиме холостого хода и при небольшой нагрузке (различные станки, транспортеры и пр.).
Обычно минимально допустимая нагрузка для двигателей большой и средней мощности составляет (0,2 …. 0,25) Iном. Чтобы предотвратить возможность работы двигателя без нагрузки, его соединяют с приводным механизмом жестко (зубчатой передачей или глухой муфтой), применение ременной передачи или фрикционной муфты недопустимо.
Несмотря на указанный недостаток, двигатели с последовательным возбуждением широко применяют, особенно там, где имеют место изменения нагрузочного момента в широких пределах и тяжелые условия пуска: во всех тяговых приводах (электровозы, тепловозы, электропоезда, электрокары, электропогрузчики и пр.), а также в приводах грузоподъемных механизмов (краны, лифты и пр.).
Объясняется это тем, что при мягкой характеристике увеличение нагрузочного момента приводит к меньшему возрастанию тока и потребляемой мощности, чем у двигателей с независимым и параллельным возбуждением, поэтому двигатели с последовательным возбуждением лучше переносят перегрузки. Кроме того, эти двигатели имеют большой пусковой момент, чем двигатели с параллельным и независимым возбуждением, так как при увеличении тока обмотки якоря при пуске соответственно увеличивается и магнитный поток.
Если принять, например, что кратковременный пусковой ток может в 2 раза превышать номинальный рабочий ток машины, и пренебречь влиянием насыщения, реакцией якоря и падением напряжения в цепи его обмотки, то в двигателе с последовательным возбуждением пусковой момент будет в 4 раза больше номинального (в 2 раза увеличиваются и ток, и магнитный поток), а в двигателях с независимым и параллельным возбуждением — только в 2 раза больше.
В действительности из-за насыщения магнитной цепи магнитный поток не увеличивается пропорционально току, но все же пусковой момент двигателя с последовательным возбуждением при прочих равных условиях будет значительно больше пускового момента такого же двигателя с независимым или параллельным возбуждением.
Зависимости n и М от мощности Р2 на валу электродвигателя (рис. 4, в), как следует из рассмотренных выше положений, являются нелинейными, зависимости P1, Iя и η от Р2 имеют такую же форму, как и у двигателей с параллельным возбуждением.
Электродвигатель постоянного тока со смешанным возбуждением
В этом электродвигателе (рис. 5, а) магнитный поток Ф создается в результате совместного действия двух обмоток возбуждения — параллельной (или независимой) и последовательной, по которым проходят токи возбуждения Iв1 и Iв2 = Iя

где Фпосл — магнитный поток последовательной обмотки, зависящий от тока Iя, Фпар — магнитный поток параллельной обмотки, который не зависит от нагрузки (определяется током возбуждения Iв1).
Механическая характеристика электродвигателя со смешанным возбуждением (рис. 5, б) располагается между характеристиками двигателей с параллельным (прямая 1) и последовательным (кривая 2) возбуждением. В зависимости от соотношения магнитодвижущих сил параллельной и последовательной обмоток при номинальном режиме можно приблизить характеристики двигателя со смешанным возбуждением к характеристике 1 (кривая 3 при малой м. д. с. последовательной обмотки) или к характеристике 2 (кривая 4 при малой м. д. с. параллельной обмотки).
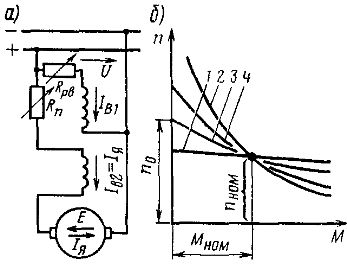
Рис. 5. Принципиальная схема электродвигателя со смешанным возбуждением (а) и его механические характеристики (б)
Достоинством двигателя постоянного тока со смешанным возбуждением является то, что он, обладая мягкой механической характеристикой, может работать при холостом ходе, когда Фпосл=0. В этом режиме частота вращения его якоря определяется магнитным потоком Фпар и имеет ограниченное значение (двигатель не идет вразнос).







